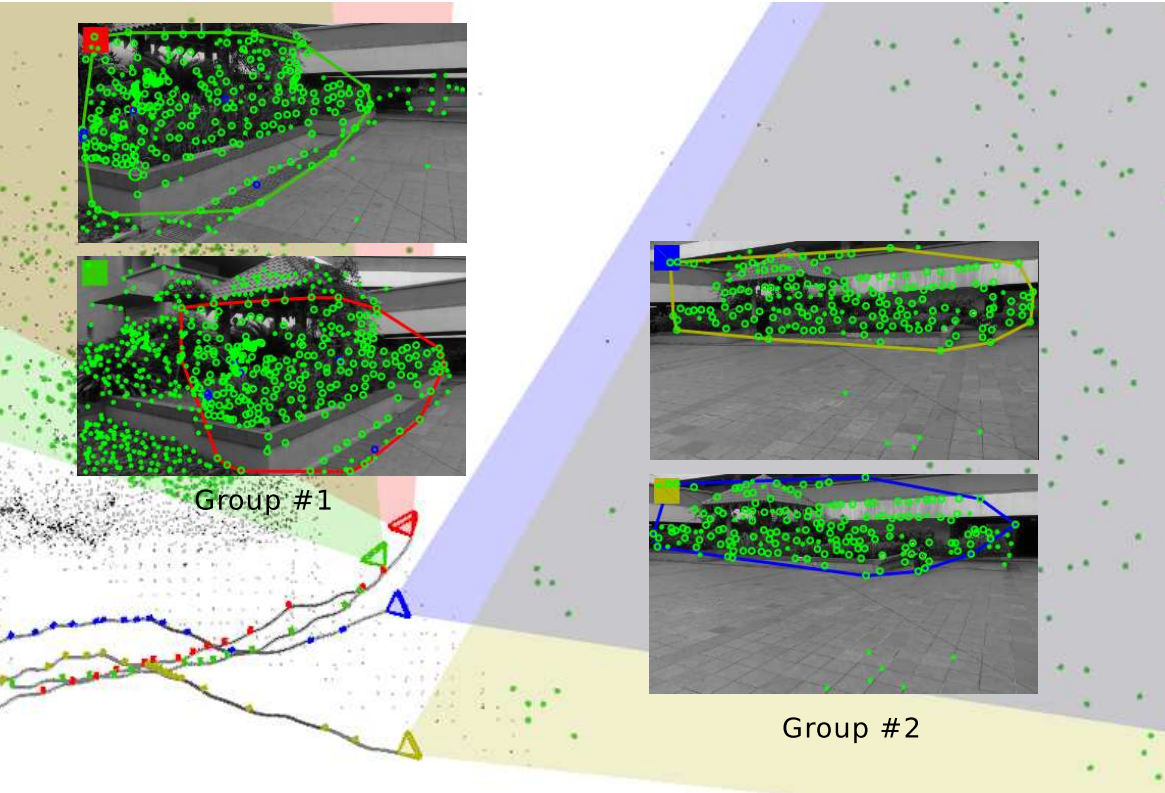
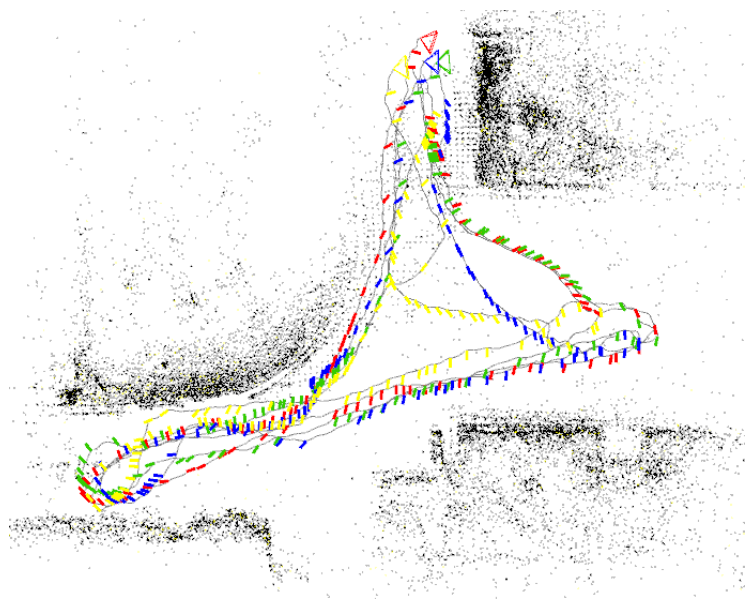
This paper studies the problem of vision-based simultaneous localization and mapping (SLAM) in dynamic environments with multiple cameras. These cameras move independently and can be mounted on different platforms. All cameras work together to build a global map, including 3D positions of static background points and trajectories of moving foreground points.We introduce inter-camera pose estimation and inter-camera mapping to deal with dynamic objects in the localization and mapping process. To further enhance the system robustness, we maintain the position uncertainty of each map point. To facilitate intercamera operations, we cluster cameras into groups according to their view overlap, and manage the split and merge of camera groups in real-time. Experimental results demonstrate that our system can work robustly in highly dynamic environments and produce more accurate results in static environments.
@article{
zou2013coslam,
title="Coslam: Collaborative visual slam in dynamic environments",
author="Zou, Danping and Tan, Ping",
journal="IEEE Trans. on Pattern Analysis and Machine Intelligence"
year="2013",
publisher="IEEE"
}