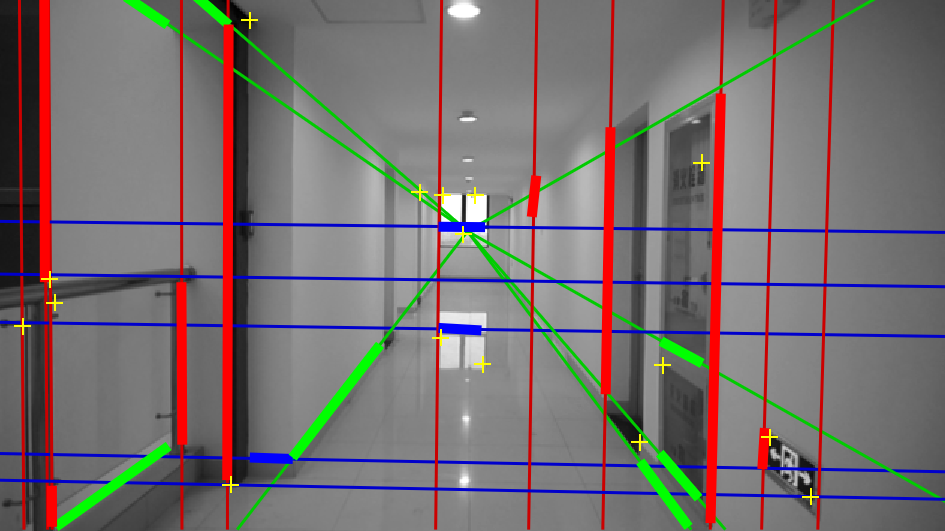
StructSLAM Result.
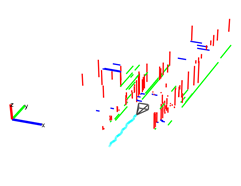
3D Map of StructSLAM.

We propose a novel 6 DoF visual SLAM method based on the structural regularity of man-made building environments. The idea is that we use the building structure lines as features for localization and mapping. Unlike other line features, the building structure lines encode the global orientation information that constrains the heading of the camera over time, eliminating the accumulated orientation errors and reducing the position drift in consequence. We extend the standard EKF visual SLAM method to adopt the building structure lines with a novel parametrization method that represents the structure lines in dominant directions. Experiments have been conducted in both synthetic and real-world scenes. The results show that, our method performs remarkably better than the existing methods in terms of position error and orientation error. In the test of indoor scenes of the public RAWSEEDS datasets, with the aid of wheel odometer, our method produces bounded position errors about 0.79 meter along a 967 meter path even though no loop closing algorithm is applied.
We also developed a fast line descriptor like ORB descriptor. The experimental results show that our line descriptor is superior to existing methods in terms of the speed and the matching correctness.
@ARTICLE{7001715,
author={Zhou, Huizhong and Zou, Danping and Pei, Ling and Ying, Rendong and Liu, Peilin and Yu, Wenxian},
journal={IEEE Transactions on Vehicular Technology},
title={StructSLAM: Visual SLAM With Building Structure Lines},
year={2015},
volume={64},
number={4},
pages={1364-1375},
doi={10.1109/TVT.2015.2388780}
}