
该数据集为组委会采用搭载OAK FFC4p相机的四旋翼所采集,该数据集提供一个丰富的视觉感知场景,采集环境为室内,室内场地中安装有 NOKOV度量动作捕捉系统可以为无人机提供毫米级位置真值。传感器包含环视相机及IMU,数据集中涉及飞行速度的不同,转向动作,场景内的动态物体,场景内光照的明暗表换。
| 序列 | 速度 | 快速转向 | 场景明暗变化 | 黑暗片段 | 动态物体 | 启动状态 |
|---|---|---|---|---|---|---|
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||

采用OAK FFC4p相机进行数据采集,相机组由四个相机以及一个板载IMU组成,其中有两个前视,一个左视,一个右视,各个相机的名称以及分布如下:
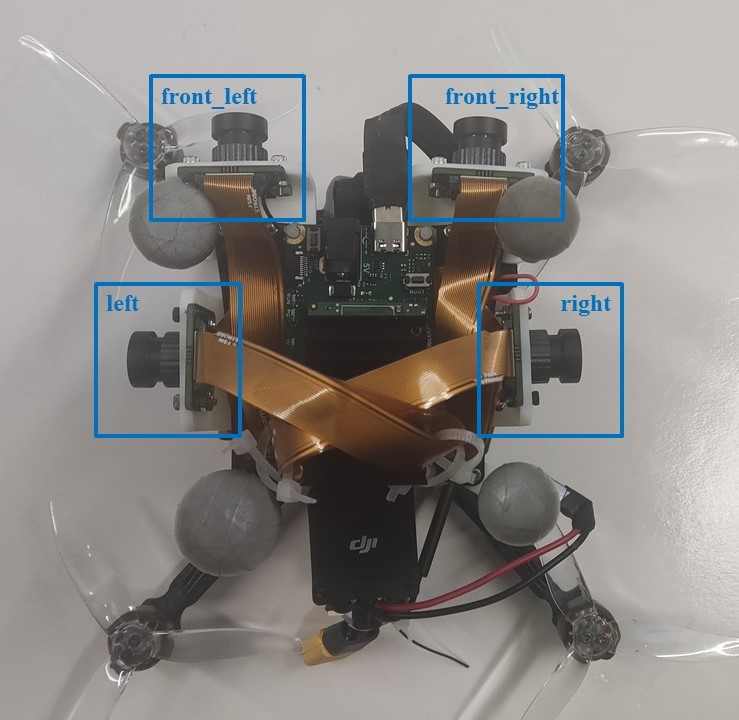
OAK FFC4p相关话题名称如下:
/oak_ffc/front_left/image,前视左侧相机,像素:680x400,帧率30hz/oak_ffc/front_right/image,前视右侧相机,像素:680x400,帧率30hz/oak_ffc/left/image,侧边左视相机,像素:680x400,帧率30hz/oak_ffc/right/image,侧边右视相机,像素:680x400,帧率30hz/oak_ffc/imu,板载IMU,帧率100hz
数据集中包含了飞控IMU信息,帧率230hz,话题名称为
/mavros/imu/data
参考真值由NOKOV 光学三维动作捕捉系统捕获得到,以
/motion_capture/odom
的ros话题形式存储在bag数据集中(正式比赛的bag包不包含该话题)。
| 飞控IMU-相机内外参结果 | 链接 | 百度网盘 [qmtt] | 谷歌云盘 |
|---|---|---|---|
| 板载IMU-相机内外参结果 | 链接 | 百度网盘 [gbip] | 谷歌云盘 |
| IMU标定结果 | 链接 | 百度网盘 [2idj] | 谷歌云盘 |
| 内外参标定原始数据 | 链接 | 百度网盘 [4zm1] | 谷歌云盘 |
| 飞控IMU-相机内外参结果 | 链接 | 百度网盘 [eomr] | 谷歌云盘 |
|---|---|---|---|
| 板载IMU-相机内外参结果 | 链接 | 百度网盘 [9vuh] | 谷歌云盘 |
| IMU标定结果 | 链接 | 百度网盘 [ossr] | 谷歌云盘 |
| 内外参标定原始数据 | 链接 | 百度网盘 [yo7w] | 谷歌云盘 |